小路 DIY 四軸飛行器後,總想掛載更多東西上去,但怎麼掛上去平衡才不會跑掉?並且可以牢牢的固定好?這點著實讓小路思考了好一陣子!直到最近終於有個雛形出來。首先!小路利用 3D Printer 打印出下圖白色的兩個掛載架(因為 3D 列印的方向很脆弱,所以透過螺絲補強)。 Read More →
小路 DIY 四軸飛行器後,總想掛載更多東西上去,但怎麼掛上去平衡才不會跑掉?並且可以牢牢的固定好?這點著實讓小路思考了好一陣子!直到最近終於有個雛形出來。首先!小路利用 3D Printer 打印出下圖白色的兩個掛載架(因為 3D 列印的方向很脆弱,所以透過螺絲補強)。 Read More →

小路在此補充當使用兩個 OrangeRX Transmitter 1W 時,一個發射端而另一個當接收端的設定。
「關於接收端 RSSI」:
使用 Transmitter 來當接收端,最大的麻煩就是沒有直接輸出的 PIN,所有的 PIN 都需要您自己焊接。首先,根據下圖將 RSSI 腳位焊接出來~ Read More →

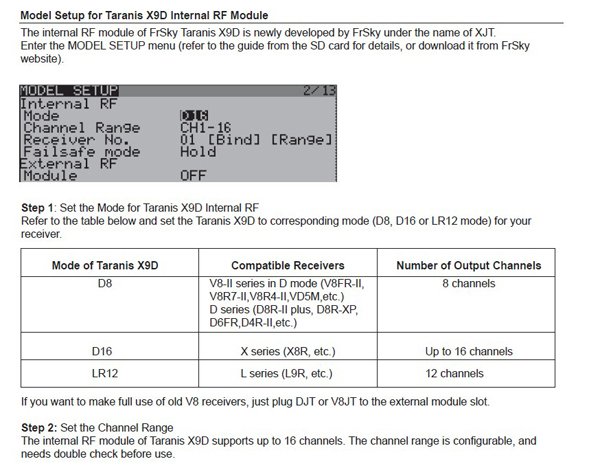
因為接觸四軸飛行器,進而瞭解搖桿的重要性。為瞭解 X9D+ 規格,小路在此寫下其特色&規格:
特性:
• RSSI 訊號強度監測 (訊號減弱時可能發生事故前,發出警報)
• 16 通道 (使用兩個 X8R 接收器)
• 64 組混控器, 9 種飛行模式
• 16 種曲線(每條曲線可有 3~17 點,32個邏輯開關)
• 傳輸天線自我撿測
• 60 組模型記憶 (可透過 SD card 擴充) Read More →

飛四軸飛行器,有時需要跑航點距離會稍微拉遠,手上的 DEVO 10 遙控器就會很不爭氣的失去訊號,雖然飛控上可以設定失去訊號不觸發返航繼續完成航點任務,但總覺得不踏實!
因此為了確切掌握控制飛行器的能力,大刀闊斧的將原本「直接遙控」方式更改成「中繼傳輸」。系統上選擇 OpenSource 的 OpenLRSng 方案,為了順便將「數位資訊傳輸」整合進來,就需要支援 Mavlink,因此得選擇 OpenLRSng 分支「gitsly」的版本。