
飛四軸飛行器,有時需要跑航點距離會稍微拉遠,手上的 DEVO 10 遙控器就會很不爭氣的失去訊號,雖然飛控上可以設定失去訊號不觸發返航繼續完成航點任務,但總覺得不踏實!
因此為了確切掌握控制飛行器的能力,大刀闊斧的將原本「直接遙控」方式更改成「中繼傳輸」。系統上選擇 OpenSource 的 OpenLRSng 方案,為了順便將「數位資訊傳輸」整合進來,就需要支援 Mavlink,因此得選擇 OpenLRSng 分支「gitsly」的版本。
Gitsly 版本檔案:https://github.com/openLRSng/openLRSng/tree/gitsly
幾經琢磨,意外不斷,共發生過下列原因:
1. 飛控板無法正確傳輸 Mavlink ,這點送修 2 次(就卡了快 1 個月)。
2. 不知該選擇何種方案:RCTW 上雖提供不少寶貴資訊,但樓高必歪,導致判斷錯誤。這裡小路試過各種方案最後才確認用 Gitsly 版本
3. OpenLRSng 傳輸方式:想要同時間可以傳輸「遙控訊號」和「數位訊號」就得區分兩者傳輸方式速率不同。這裡小路也卡了好一陣子。
好囉!以上都是廢話,現在講解製作中繼器的步驟(真的只有簡單的步驟,詳細的資訊請多 GOOGLE)
步驟一:準備材料
製作所需要的東西如下:
- OrangeTX 1W 發送器 x2
- Bluetooth 傳輸模組 x1
- 遙控器接收器 x1
- PWM > PPM encoder x1
- 電源供應板 12V x1
- 電源供應板 5v x1
- FTDI 轉換模組(刷機用) x1
其它可由可無的東西如下:
- 電壓表 (低壓提醒) x1
- 電源開關
步驟二:將發送器韌體改成 OpenLRSng
東西準備好之後,就可以先將 OrangeTX 刷機成 OpenLRSng 的韌體。請使用 Arduino 將下載的 Gitsly 程式內的硬體設定,設定好然後編譯上傳刷到 OrangeTX。
特別注意:上傳需透過 FDTI 傳輸模組來當中介 (接線方法請參考:http://oaione.blogspot.tw/2014_09_01_archive.html ,再此就不多介紹!)
步驟三:設定發送器
韌體刷好之後,需要一個終端機軟體(例如 Microsoft 的”超級終端機”)或其它可以做 CLI 通訊的軟體。
進入後,可以看到下列畫面:(此畫面為 kris000 大大所翻譯)
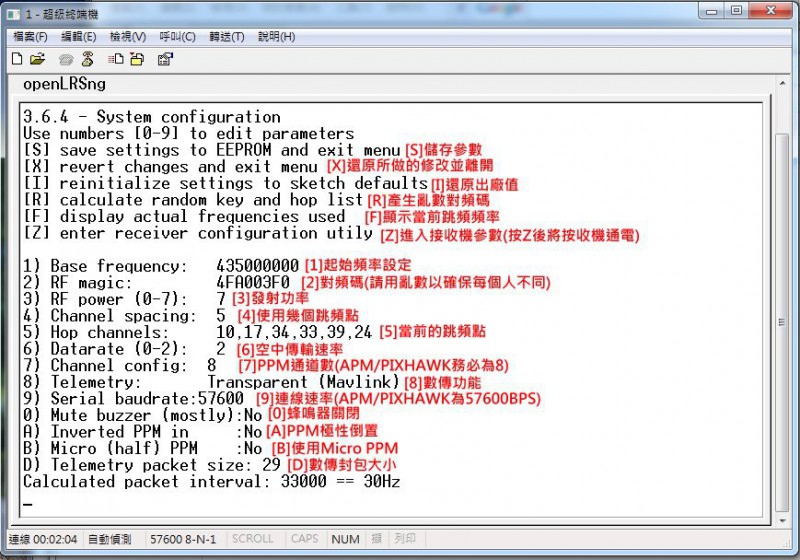
進入畫面後主要要設定的是「對頻」、「跳頻點」、「封包大小」並確定「傳輸速率」。
特別注意:進入 CLI 前,先將「發射器」和「接收器」對頻。
步驟五:設定 FailSafe (失控保護)
這點其實是最重要,設定好並驗證它!不然一升空就準備跟您的飛行器說 Bye Bye 。在此請特別注意,需要設定 FailSafe 的地方分別為「中繼器斷訊」和您手上「遙控器斷訊」時的保護。
以上。
最後:文章有很多地方簡略帶過,因為網路上已經有相關文章,在此提供最讓小路獲益的文章。
(RCTW 的 長距離遙控+數傳方案 III 內有許多 kris000 的精闢回答)
閱讀該文請注意:文章一開始時,K 大的教學是使用 OrangeRX 來做, 當時連結使用的版本應該是「flipflap」的韌體,一直到發生互相衝突後,改成使用「OpenLRSng by K大」的韌體版本,在一直綿延到討論串的後段,K大設計了相關版子,然後持續提供韌體到 16 動。
最近因為開發 3D Printer 噴頭很順利,就順便設計了整個傳輸器的新衣。經過幾個小時的列印,成品如下:
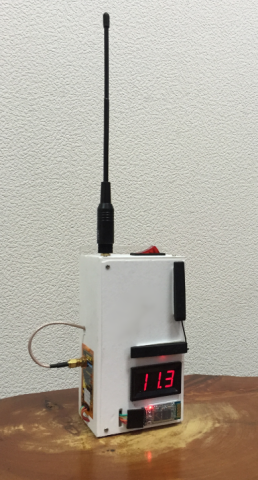
如果要說還有什麼可以改善的,大概就是「應該印黑色!」(不過小路只有白色 PLA)